Quick reference for the pyboard
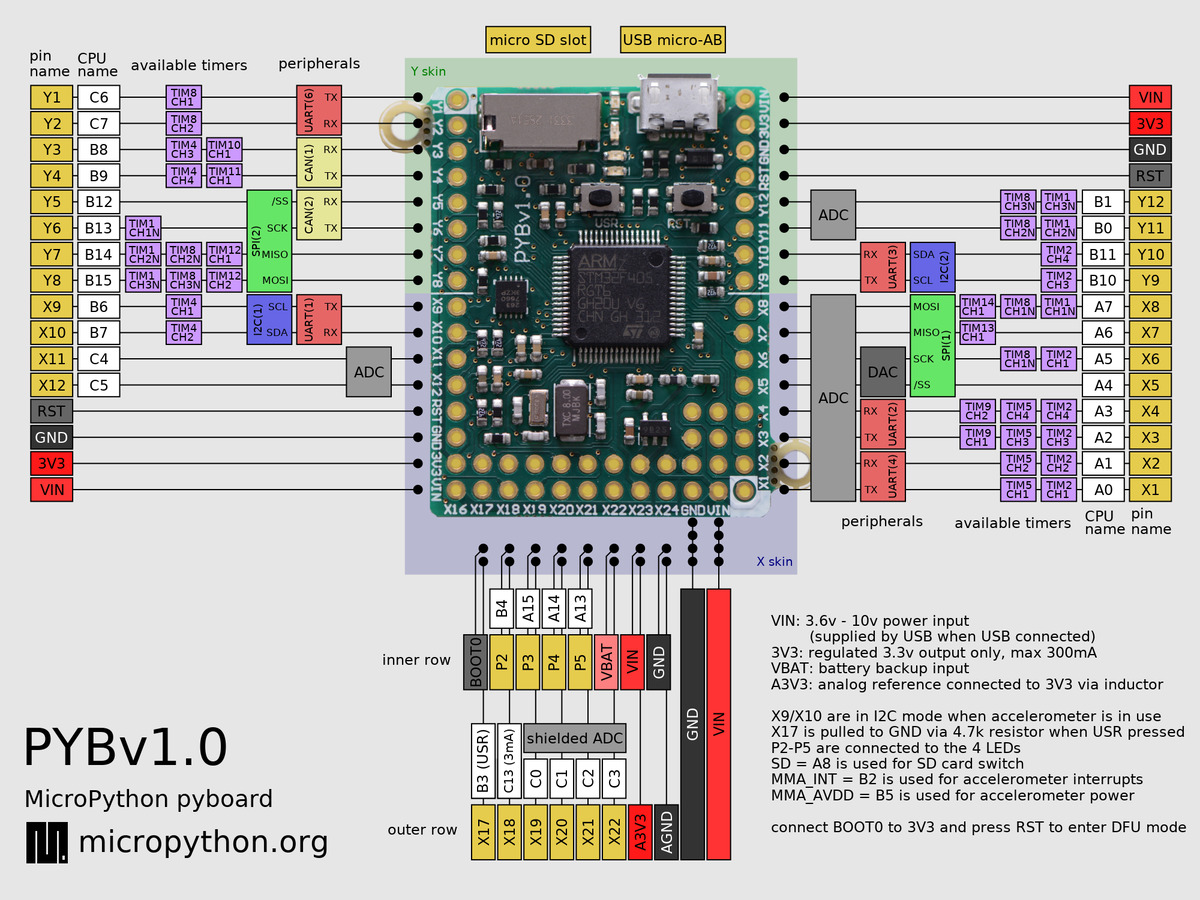
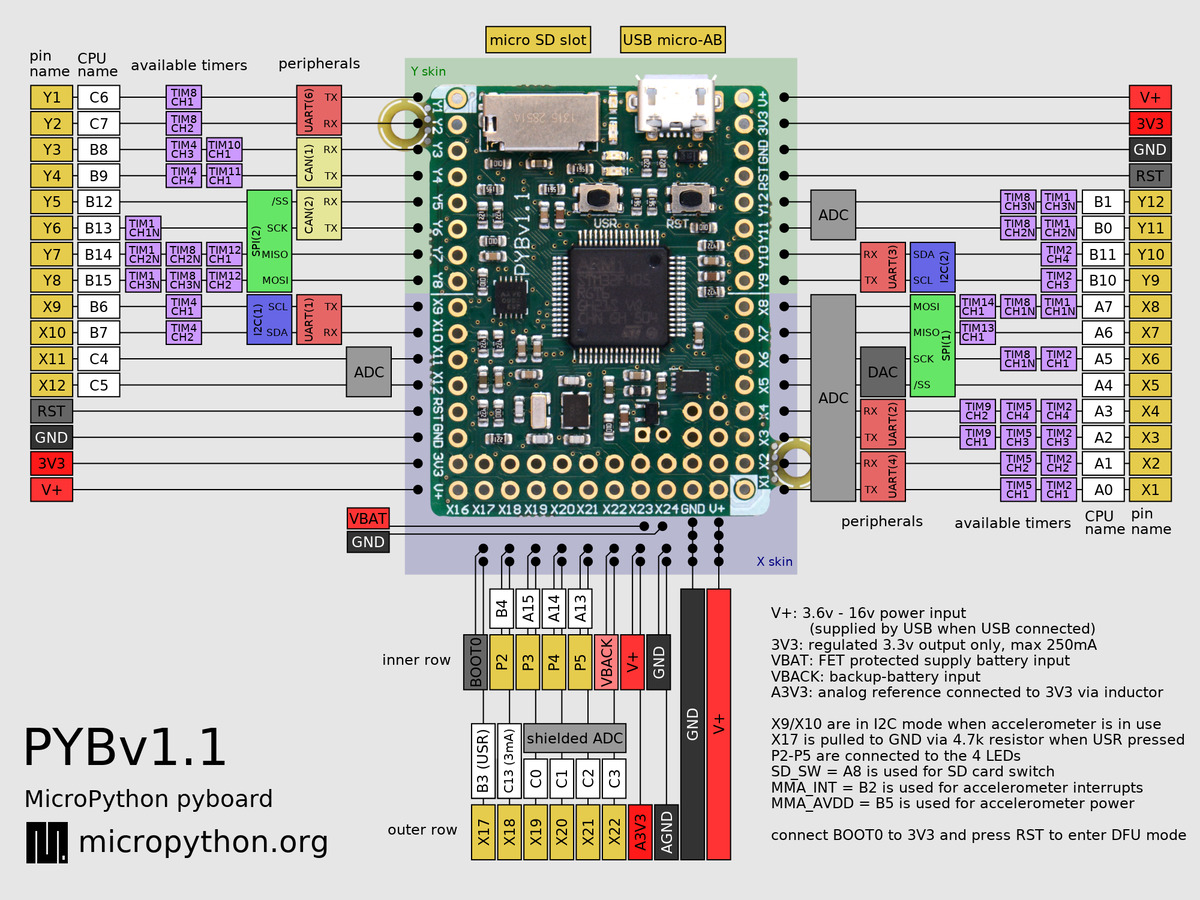
The below pinout is for PYBv1.1. You can also view pinouts for other versions of the pyboard: PYBv1.0 or PYBLITEv1.0-AC or PYBLITEv1.0.
{kind=link}
{kind=link}
{kind=link}
Below is a quick reference for the pyboard. If it is your first time working with this board please consider reading the following sections first:
General board control
See pyb.
import pyb
pyb.repl_uart(pyb.UART(1, 9600)) # duplicate REPL on UART(1)
pyb.wfi() # pause CPU, waiting for interrupt
pyb.freq() # get CPU and bus frequencies
pyb.freq(60000000) # set CPU freq to 60MHz
pyb.stop() # stop CPU, waiting for external interrupt
Delay and timing
Use the time module:
import time
time.sleep(1) # sleep for 1 second
time.sleep_ms(500) # sleep for 500 milliseconds
time.sleep_us(10) # sleep for 10 microseconds
start = time.ticks_ms() # get value of millisecond counter
delta = time.ticks_diff(time.ticks_ms(), start) # compute time difference
Internal LEDs
See pyb.LED.
from pyb import LED
led = LED(1) # 1=red, 2=green, 3=yellow, 4=blue
led.toggle()
led.on()
led.off()
# LEDs 3 and 4 support PWM intensity (0-255)
LED(4).intensity() # get intensity
LED(4).intensity(128) # set intensity to half
Internal switch
See pyb.Switch.
from pyb import Switch
sw = Switch()
sw.value() # returns True or False
sw.callback(lambda: pyb.LED(1).toggle())
Pins and GPIO
See pyb.Pin.
from pyb import Pin
p_out = Pin('X1', Pin.OUT_PP)
p_out.high()
p_out.low()
p_in = Pin('X2', Pin.IN, Pin.PULL_UP)
p_in.value() # get value, 0 or 1
Servo control
See pyb.Servo.
from pyb import Servo
s1 = Servo(1) # servo on position 1 (X1, VIN, GND)
s1.angle(45) # move to 45 degrees
s1.angle(-60, 1500) # move to -60 degrees in 1500ms
s1.speed(50) # for continuous rotation servos
External interrupts
See pyb.ExtInt.
from pyb import Pin, ExtInt
callback = lambda e: print("intr")
ext = ExtInt(Pin('Y1'), ExtInt.IRQ_RISING, Pin.PULL_NONE, callback)
Timers
See pyb.Timer.
from pyb import Timer
tim = Timer(1, freq=1000)
tim.counter() # get counter value
tim.freq(0.5) # 0.5 Hz
tim.callback(lambda t: pyb.LED(1).toggle())
RTC (real time clock)
See pyb.RTC
from pyb import RTC
rtc = RTC()
rtc.datetime((2017, 8, 23, 0, 1, 12, 48, 0)) # set a specific date and
# time, eg. 2017/8/23 1:12:48
# the day-of-week value is ignored
rtc.datetime() # get date and time
PWM (pulse width modulation)
from pyb import Pin, Timer
p = Pin('X1') # X1 has TIM2, CH1
tim = Timer(2, freq=1000)
ch = tim.channel(1, Timer.PWM, pin=p)
ch.pulse_width_percent(50)
ADC (analog to digital conversion)
from pyb import Pin, ADC
adc = ADC(Pin('X19'))
adc.read() # read value, 0-4095
DAC (digital to analog conversion)
from pyb import Pin, DAC
dac = DAC(Pin('X5'))
dac.write(120) # output between 0 and 255
UART (serial bus)
See pyb.UART.
from pyb import UART
uart = UART(1, 9600)
uart.write('hello')
uart.read(5) # read up to 5 bytes
SPI bus
See pyb.SPI.
from pyb import SPI
spi = SPI(1, SPI.CONTROLLER, baudrate=200000, polarity=1, phase=0)
spi.send('hello')
spi.recv(5) # receive 5 bytes on the bus
spi.send_recv('hello') # send and receive 5 bytes
I2C bus
Hardware I2C is available on the X and Y halves of the pyboard via I2C('X')
and I2C('Y'). Alternatively pass in the integer identifier of the peripheral,
eg I2C(1). Software I2C is also available by explicitly specifying the
scl and sda pins instead of the bus name. For more details see
machine.I2C.
from machine import I2C
i2c = I2C('X', freq=400000) # create hardware I2c object
i2c = I2C(scl='X1', sda='X2', freq=100000) # create software I2C object
i2c.scan() # returns list of peripheral addresses
i2c.writeto(0x42, 'hello') # write 5 bytes to peripheral with address 0x42
i2c.readfrom(0x42, 5) # read 5 bytes from peripheral
i2c.readfrom_mem(0x42, 0x10, 2) # read 2 bytes from peripheral 0x42, peripheral memory 0x10
i2c.writeto_mem(0x42, 0x10, 'xy') # write 2 bytes to peripheral 0x42, peripheral memory 0x10
Note: for legacy I2C support see pyb.I2C.
I2S bus
See machine.I2S.
from machine import I2S, Pin
i2s = I2S(2, sck=Pin('Y6'), ws=Pin('Y5'), sd=Pin('Y8'), mode=I2S.TX, bits=16, format=I2S.STEREO, rate=44100, ibuf=40000) # create I2S object
i2s.write(buf) # write buffer of audio samples to I2S device
i2s = I2S(1, sck=Pin('X5'), ws=Pin('X6'), sd=Pin('Y4'), mode=I2S.RX, bits=16, format=I2S.MONO, rate=22050, ibuf=40000) # create I2S object
i2s.readinto(buf) # fill buffer with audio samples from I2S device
The I2S class is currently available as a Technical Preview. During the preview period, feedback from users is encouraged. Based on this feedback, the I2S class API and implementation may be changed.
PYBv1.0/v1.1 has one I2S bus with id=2. PYBD-SFxW has two I2S buses with id=1 and id=2. I2S is shared with SPI.
CAN bus (controller area network)
See pyb.CAN.
from pyb import CAN
can = CAN(1, CAN.LOOPBACK)
can.setfilter(0, CAN.LIST16, 0, (123, 124, 125, 126))
can.send('message!', 123) # send a message with id 123
can.recv(0) # receive message on FIFO 0
Internal accelerometer
See pyb.Accel.
from pyb import Accel
accel = Accel()
print(accel.x(), accel.y(), accel.z(), accel.tilt())