class Pin – control I/O pins¶
A pin object is used to control I/O pins (also known as GPIO - general-purpose
input/output). Pin objects are commonly associated with a physical pin that can
drive an output voltage and read input voltages. The pin class has methods to set the mode of
the pin (IN, OUT, etc) and methods to get and set the digital logic level.
For analog control of a pin, see the ADC class.
A pin object is constructed by using an identifier which unambiguously specifies a certain I/O pin. The allowed forms of the identifier and the physical pin that the identifier maps to are port-specific. Possibilities for the identifier are an integer, a string or a tuple with port and pin number.
Usage Model:
from machine import Pin
# create an output pin on pin #0
p0 = Pin(0, Pin.OUT)
# set the value low then high
p0.value(0)
p0.value(1)
# create an input pin on pin #2, with a pull up resistor
p2 = Pin(2, Pin.IN, Pin.PULL_UP)
# read and print the pin value
print(p2.value())
# reconfigure pin #0 in input mode
p0.mode(p0.IN)
# configure an irq callback
p0.irq(lambda p:print(p))
On the WiPy board the pins are identified by their string id:
from machine import Pin
g = machine.Pin('GP9', mode=Pin.OUT, pull=None, drive=Pin.MED_POWER, alt=-1)
You can also configure the Pin to generate interrupts. For instance:
from machine import Pin
def pincb(pin):
print(pin.id())
pin_int = Pin('GP10', mode=Pin.IN, pull=Pin.PULL_DOWN)
pin_int.irq(trigger=Pin.IRQ_RISING, handler=pincb)
# the callback can be triggered manually
pin_int.irq()()
# to disable the callback
pin_int.irq().disable()
Now every time a falling edge is seen on the gpio pin, the callback will be executed. Caution: mechanical push buttons have “bounce” and pushing or releasing a switch will often generate multiple edges. See: http://www.eng.utah.edu/~cs5780/debouncing.pdf for a detailed explanation, along with various techniques for debouncing.
All pin objects go through the pin mapper to come up with one of the gpio pins.
For the drive parameter the strengths are:
Pin.LOW_POWER- 2mA drive capability.Pin.MED_POWER- 4mA drive capability.Pin.HIGH_POWER- 6mA drive capability.
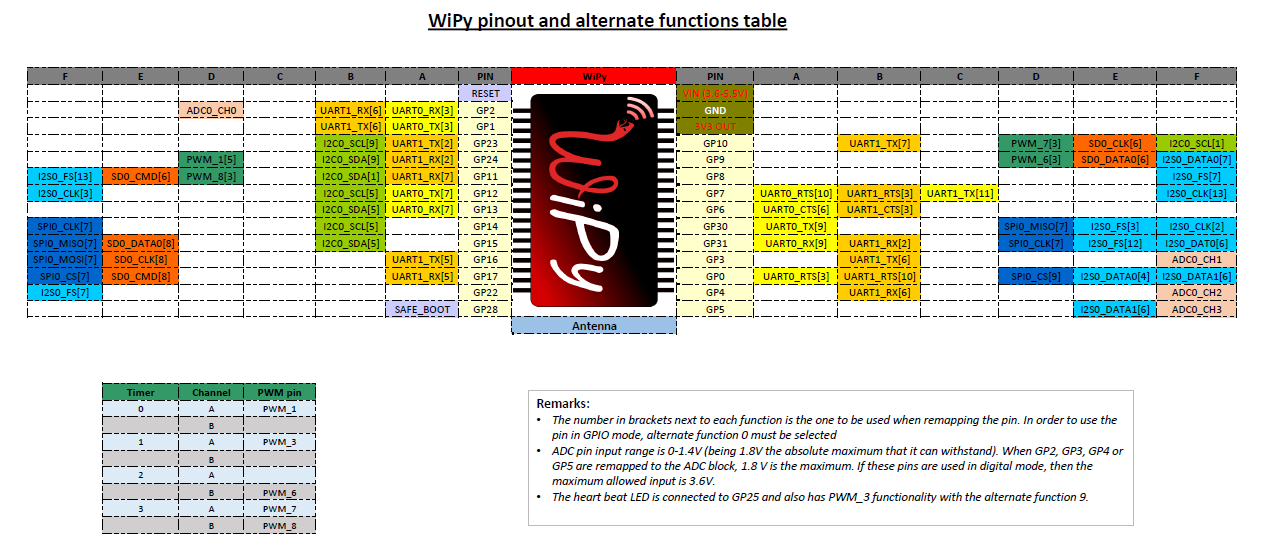
For the alt parameter please refer to the pinout and alternate functions
table at <https://raw.githubusercontent.com/wipy/wipy/master/docs/PinOUT.png>`_
for the specific alternate functions that each pin supports.
{kind=link}
For interrupts, the priority can take values in the range 1-7. And the
wake parameter has the following properties:
- If
wake_from=machine.Sleep.ACTIVEany pin can wake the board.- If
wake_from=machine.Sleep.SUSPENDEDpinsGP2,GP4,GP10,GP11, GP17`` orGP24can wake the board. Note that only 1 of this pins can be enabled as a wake source at the same time, so, only the last enabled pin as amachine.Sleep.SUSPENDEDwake source will have effect.- If
wake_from=machine.Sleep.SUSPENDEDpinsGP2,GP4,GP10,GP11,GP17andGP24can wake the board. In this case all of the 6 pins can be enabled as amachine.Sleep.HIBERNATEwake source at the same time.
Constructors¶
-
class
machine.Pin(id, mode=-1, pull=-1, *, value, drive, alt)¶ Access the pin peripheral (GPIO pin) associated with the given
id. If additional arguments are given in the constructor then they are used to initialise the pin. Any settings that are not specified will remain in their previous state.The arguments are:
idis mandatory and can be an arbitrary object. Among possible value types are: int (an internal Pin identifier), str (a Pin name), and tuple (pair of [port, pin]).modespecifies the pin mode, which can be one of:Pin.IN- Pin is configured for input. If viewed as an output the pin is in high-impedance state.Pin.OUT- Pin is configured for (normal) output.Pin.OPEN_DRAIN- Pin is configured for open-drain output. Open-drain output works in the following way: if the output value is set to 0 the pin is active at a low level; if the output value is 1 the pin is in a high-impedance state. Not all ports implement this mode, or some might only on certain pins.Pin.ALT- Pin is configured to perform an alternative function, which is port specific. For a pin configured in such a way any other Pin methods (exceptPin.init()) are not applicable (calling them will lead to undefined, or a hardware-specific, result). Not all ports implement this mode.Pin.ALT_OPEN_DRAIN- The Same asPin.ALT, but the pin is configured as open-drain. Not all ports implement this mode.
pullspecifies if the pin has a (weak) pull resistor attached, and can be one of:None- No pull up or down resistor.Pin.PULL_UP- Pull up resistor enabled.Pin.PULL_DOWN- Pull down resistor enabled.
valueis valid only for Pin.OUT and Pin.OPEN_DRAIN modes and specifies initial output pin value if given, otherwise the state of the pin peripheral remains unchanged.drivespecifies the output power of the pin and can be one of:Pin.LOW_POWER,Pin.MED_POWERorPin.HIGH_POWER. The actual current driving capabilities are port dependent. Not all ports implement this argument.altspecifies an alternate function for the pin and the values it can take are port dependent. This argument is valid only forPin.ALTandPin.ALT_OPEN_DRAINmodes. It may be used when a pin supports more than one alternate function. If only one pin alternate function is supported the this argument is not required. Not all ports implement this argument.
As specified above, the Pin class allows to set an alternate function for a particular pin, but it does not specify any further operations on such a pin. Pins configured in alternate-function mode are usually not used as GPIO but are instead driven by other hardware peripherals. The only operation supported on such a pin is re-initialising, by calling the constructor or
Pin.init()method. If a pin that is configured in alternate-function mode is re-initialised withPin.IN,Pin.OUT, orPin.OPEN_DRAIN, the alternate function will be removed from the pin.
Methods¶
-
Pin.init(mode=-1, pull=-1, *, value, drive, alt)¶ Re-initialise the pin using the given parameters. Only those arguments that are specified will be set. The rest of the pin peripheral state will remain unchanged. See the constructor documentation for details of the arguments.
Returns
None.
-
Pin.value([x])¶ This method allows to set and get the value of the pin, depending on whether the argument
xis supplied or not.If the argument is omitted then this method gets the digital logic level of the pin, returning 0 or 1 corresponding to low and high voltage signals respectively. The behaviour of this method depends on the mode of the pin:
Pin.IN- The method returns the actual input value currently present on the pin.Pin.OUT- The behaviour and return value of the method is undefined.Pin.OPEN_DRAIN- If the pin is in state ‘0’ then the behaviour and return value of the method is undefined. Otherwise, if the pin is in state ‘1’, the method returns the actual input value currently present on the pin.
If the argument is supplied then this method sets the digital logic level of the pin. The argument
xcan be anything that converts to a boolean. If it converts toTrue, the pin is set to state ‘1’, otherwise it is set to state ‘0’. The behaviour of this method depends on the mode of the pin:Pin.IN- The value is stored in the output buffer for the pin. The pin state does not change, it remains in the high-impedance state. The stored value will become active on the pin as soon as it is changed toPin.OUTorPin.OPEN_DRAINmode.Pin.OUT- The output buffer is set to the given value immediately.Pin.OPEN_DRAIN- If the value is ‘0’ the pin is set to a low voltage state. Otherwise the pin is set to high-impedance state.
When setting the value this method returns
None.
-
Pin.out_value()¶ Return the value stored in the output buffer of a pin, regardless of its mode.
Not all ports implement this method.
-
Pin.__call__([x])¶ Pin objects are callable. The call method provides a (fast) shortcut to set and get the value of the pin. It is equivalent to Pin.value([x]). See
Pin.value()for more details.
-
Pin.toggle()¶ Toggle the output value of the pin. Equivalent to
pin.value(not pin.out_value()). ReturnsNone.Not all ports implement this method.
Availability: WiPy.
-
Pin.id()¶ Get the pin identifier. This may return the
idas specified in the constructor. Or it may return a canonical software-specific pin id.
-
Pin.mode([mode])¶ Get or set the pin mode. See the constructor documentation for details of the
modeargument.
-
Pin.pull([pull])¶ Get or set the pin pull state. See the constructor documentation for details of the
pullargument.
-
Pin.drive([drive])¶ Get or set the pin drive strength. See the constructor documentation for details of the
driveargument.Not all ports implement this method.
Availability: WiPy.
-
Pin.irq(handler=None, trigger=(Pin.IRQ_FALLING | Pin.IRQ_RISING), *, priority=1, wake=None)¶ Configure an interrupt handler to be called when the trigger source of the pin is active. If the pin mode is
Pin.INthen the trigger source is the external value on the pin. If the pin mode isPin.OUTthen the trigger source is the output buffer of the pin. Otherwise, if the pin mode isPin.OPEN_DRAINthen the trigger source is the output buffer for state ‘0’ and the external pin value for state ‘1’.The arguments are:
handleris an optional function to be called when the interrupt triggers.triggerconfigures the event which can generate an interrupt. Possible values are:Pin.IRQ_FALLINGinterrupt on falling edge.Pin.IRQ_RISINGinterrupt on rising edge.Pin.IRQ_LOW_LEVELinterrupt on low level.Pin.IRQ_HIGH_LEVELinterrupt on high level.
These values can be OR’ed together to trigger on multiple events.
prioritysets the priority level of the interrupt. The values it can take are port-specific, but higher values always represent higher priorities.wakeselects the power mode in which this interrupt can wake up the system. It can bemachine.IDLE,machine.SLEEPormachine.DEEPSLEEP. These values can also be OR’ed together to make a pin generate interrupts in more than one power mode.
This method returns a callback object.
-
Pin.alt_list()¶ Returns a list of the alternate functions supported by the pin. List items are a tuple of the form:
('ALT_FUN_NAME', ALT_FUN_INDEX)Availability: WiPy.
Attributes¶
-
class
Pin.board¶ Contains all
Pinobjects supported by the board. Examples:Pin.board.GP25 led = Pin(Pin.board.GP25, mode=Pin.OUT) Pin.board.GP2.alt_list()
Availability: WiPy.